Конструкция 3D-принтера — ключевой фактор выбора модели, определяющий как удобство калибровки, так и возможности печати, ее скорость, вобблинг, пропуск шагов, программную сторону вопроса и другие нюансы. Основой конструкции является кинематическая схема устройства. В настоящее время у производителей 3D-принтеров для технологии печати наплавленной нитью FDM/FFF есть три возможности управлять движением экструдера:
- двигать сам экструдер;
- перемещать (вращать) стол, на котором выполняется печать;
- менять положение обоих узлов по согласованной схеме.
Последний вариант логичен с точки зрения скорости печати, поэтому наиболее распространен, но есть и исключения. Все схемы могут быть реализованы в полярной и декартовой системе координат. Наиболее распространены Cartesian-принтеры, к которым формально можно отнести как Cartesian так и Delta, CoreXY, H-bot, SCARA и Belt.
Cartesian-кинематика
Портальные Cartesian-принтеры построены на принципе перемещения отдельных элементов по трем декартовым координатам. Среди наиболее распространенных вариантов:
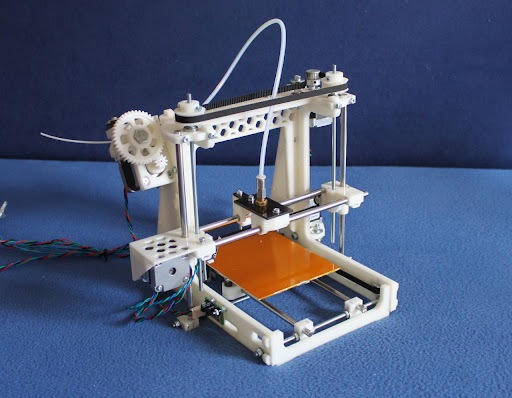
- Cartesian-XZ-head: экструдер движется по осям X и Z, а стол — по оси Y (Prusa Mendel, Huxley, Prusa i3);
- Cartesian-X-head: экструдер движется по оси X, а стол — по осям Z и Y (Felix, МЗТО);
- Cartesian-XY-head: экструдер движется по осям X и Y, а стол — по оси Z (Ultimaker).
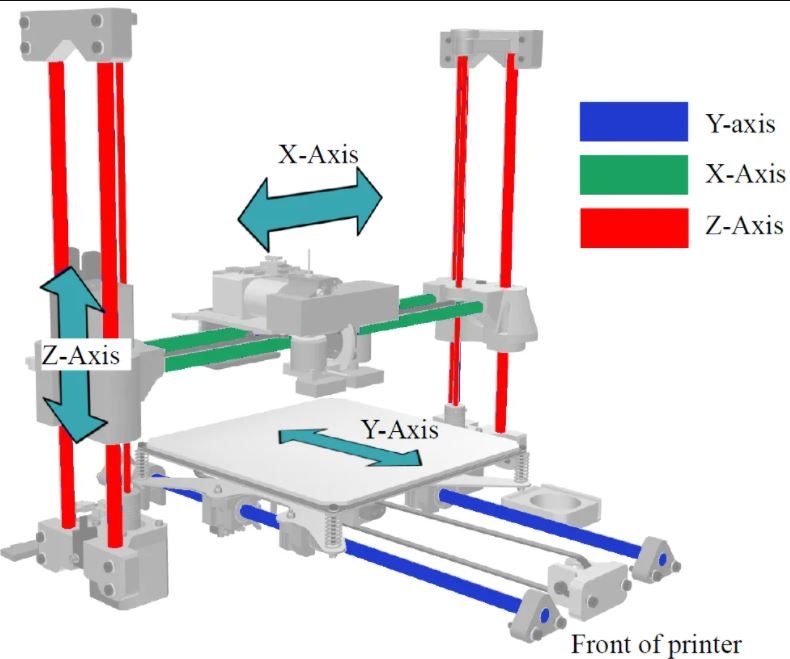
Наиболее распространена схема Prusa, которая предполагает перемещение двигателей по направляющим шпилькам: два мотора для направляющих по оси Z, по одному — для осей X и Z. Вариант прост в сборке, нормально решает бытовые задачи, позволяет видеть процесс печати. Последний фактор одновременно является и недостатком, потому что приводит к эффекту деламинации из-за повышенного неравномерного охлаждения стола. Это требует создания хендмейд-корпуса, который уменьшает вынужденную конвекцию воздуха на столе. Также схема Пруша плохо работает при повышенных требованиях к инерционности стола, например, при небольшом сечении и большой высоте модели.
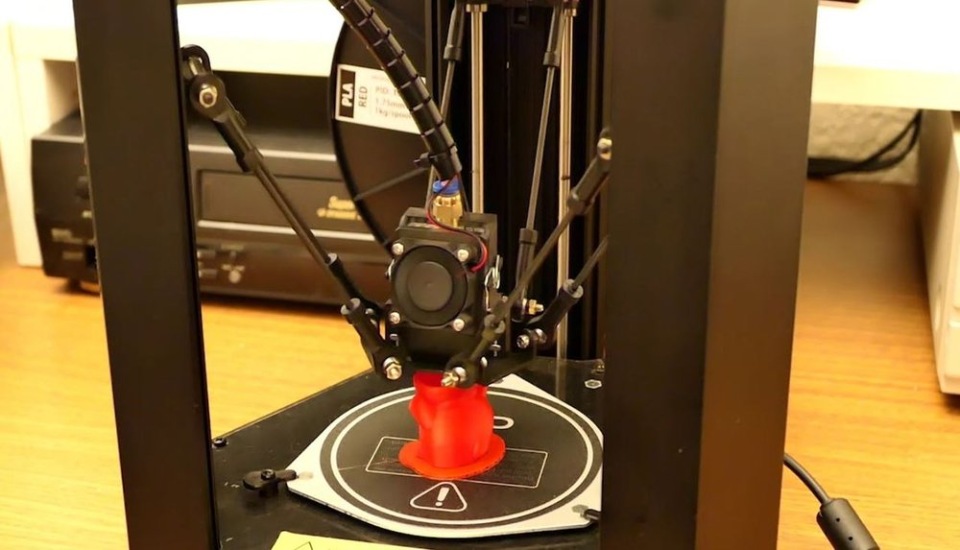
Delta-кинематика
Еще одна разновидность «декартовых» принтеров с интересной схемой реализации. В этом варианте движется только хотенд, связанный с тремя вертикальными направляющими, по которым перемещаются три независимых мотора. С их корпусом шарнирно соединяются три рычага, другие концы которых крепятся к печатающей головке. Уменьшая высоту одного из моторов, можно увеличить горизонтальную составляющую соответствующего рычага и сместить экструдер в противоположном направлении. Скоординировано меняя положение трех моторов, дельта-принтер управляет высотой (ось Z) и положением (оси X и Y) печатающей головки относительно платформы для печати.
Преимущества:
- относительно высокая скорость печати;
- высокое качество;
- подходит для высоких моделей небольшого сечения.
Delta-принтеры, например, Monoprice MP Delta Pro или BIQU Magician, подходят для печати небольших моделей и достаточно сложны в модернизации и ремонте.
CoreXY и H-Bot
Для обоих видов Cartesian-кинематики характерен нестандартный подход к перемещению экструдера. Принтеры CoreXY оснащены двумя двигателями, которые управляют двумя ремнями, перемещающими экструдер в плоскости XY.
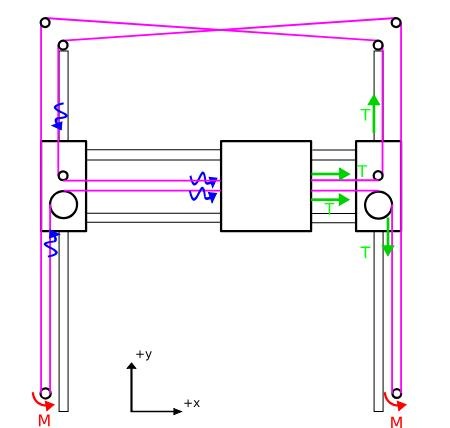
Кинематика H-Bot аналогична, но использует другую схему ременной передачи. На раме закреплен только один H-образный ремень, отсюда и название кинематики.
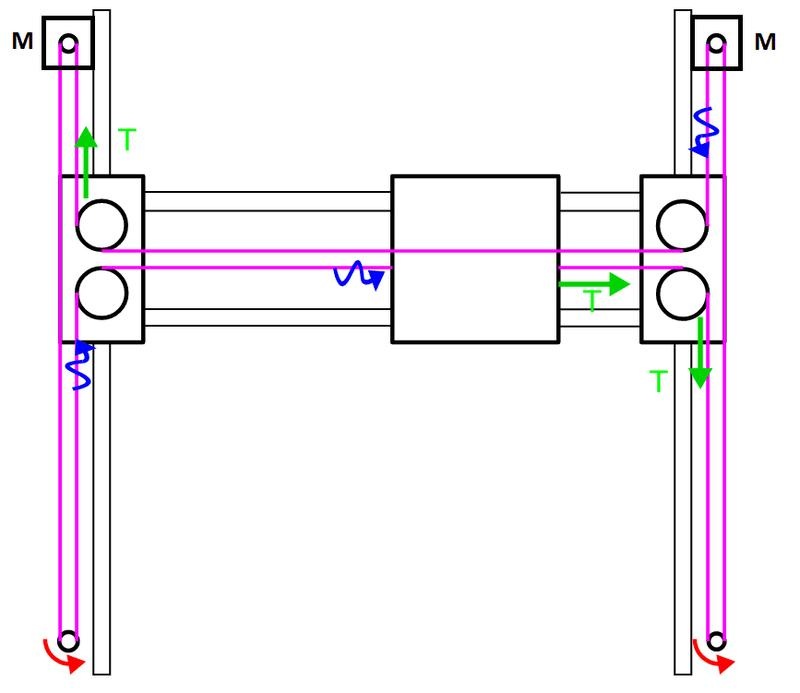
Когда оба мотора вращаются в одном направлении, экструдер движется по оси X, когда они вращаются в разных направлениях, он движется по оси Y. Когда один из двигателей неактивен, голова движется по диагонали.
0 комментариев